
Согласующее устройство для многодиапазонной коротковолновой антенны
Чучко В.Ф. (RZ3TJ), г. Саров Нижегородской обл.
Согласующее устройство (СУ) предназначено для трансформации входного сопротивления антенны, которое, обычно, носит комплексный характер, в активное сопротивление, равное волновому сопротивлению фидера питающего антенну. Описываемое СУ относится к классу устройств, располагающихся между фидером и антенной.
Основное назначение этого СУ состоит даже не в том, чтобы уменьшить потери в антенно-фидерном тракте, возникающие из-за рассогласования фидера и антенны, а в том, чтобы создать комфортные условия работы для радиолюбителя и заставить антенну работать в нужных диапазонах частот.
Применяя описываемое устройство, отпадает необходимость применения, перестраиваемых на каждом диапазоне, устройств согласования трансивера с антенной. Это становится возможным из-за того, что входное сопротивление фидера всегда будет близко к требуемому сопротивлению нагрузки трансивера. Конечно, это произойдет только в случае, если СУ правильно спроектировано и изготовлено.
СУ не содержит в своем составе никаких коммутирующих элементов, управляемых извне (реле, диодов и др.). Оно состоит только из пассивных и линейных элементов – катушек индуктивности и конденсаторов.
Изменение характеристик, необходимое для процесса согласования в каждом из диапазонов частот происходит автоматически. Точнее СУ всегда имеет требуемые характеристики для согласования фидера с антенной на каждом диапазоне.
Таким образом, радиолюбитель, только переключив диапазон, сразу работает на согласованную с трансивером антенну.
В технических терминах задачу разработки СУ можно сформулировать так:
нужно создать (синтезировать) такой четырехполюсник (блок, узел с четырьмя выводами), который будет иметь активное и при том строго определенное входное сопротивление в оговоренных диапазонах частот, когда к его выходу подключено комплексное сопротивление нагрузки, изменяющееся определенным образом.
Основные компоненты антенно-фидерного тракта показаны на Рис.1.
|
где:
Rн – требуемое сопротивление нагрузки трансивера
ρ – волновое сопротивление фидера
Zвх – входное сопротивление согласующего устройства
Za = Ra + iXa – входное сопротивление антенны
Рис.1. Основные компоненты антенно-фидерного тракта
Для согласования необходимо, чтобы Rн = ρ = Zвх при любых возможных Za в пределах любительских диапазонов. Эту задачу и должно решать СУ.
Работа по созданию такого согласующего устройства довольно кропотлива, но она под силу радиолюбителю средней квалификации.
В качестве исходных данных для разработки необходимо знать активную часть Ra и реактивную часть Xa входного сопротивления антенны и их зависимость от частоты в пределах интересующих диапазонов.
Есть два способа получения этих сведений: измерение и расчет.
Для проведения измерений необходима собственно антенна (или ее физическая модель), измерительные приборы и методика измерений.
Антенну, обычно, строит сам радиолюбитель.
В качестве измерительных приборов можно применять измерители комплексных коэффициентов передачи Р4-11, Р4-37/1, Р4-68, «Обзор 103», векторные анализаторы электрических цепей «R&S ZRVE», Agilent (Hewlett Packard) 8714 ET, AEA Vector Impedance Analyzer 432916 и др.
Это дорогие приборы, поэтому радиолюбителям больше подходят более дешевые и простые, например, анализатор антенн MFJ-269 и векторный анализатор VA1 Vector R-X Analyst [1].
Есть также очень неплохие приборы любительской разработки. Это анализатор антенн АА908, разработанный George L Heron N2APB и Joseph H Everhart N2CX [2], векторный анализатор цепей miniVNA, разработанный Davide Tosatti IW3HEV и Alessandro Zanotti IW3IJZ [3] и векторный анализатор цепей VNA, разработанный Paul A Kiciak N2PK [4].
Можно также воспользоваться и высокочастотным измерительным мостом, например, MFJ-202B или даже самодельным.
При проведении измерений полезно использовать известные принципы повышения достоверности результатов:
· очень хорошо представлять себе, что и как измеряется,
· проводить работу максимально аккуратно,
· в процессе измерений периодически калибровать измерительную аппаратуру,
· проводить многократные измерения на каждой из частот,
· усреднять результаты с целью повышения точности,
· следить за тем, чтобы результаты измерений на одной частоте не отклонялись друг от друга более чем на величину предполагаемой (желаемой) погрешности,
· не продолжать измерений, если какой-нибудь результат измерений сильно отклонился от аналогичных, до тех пор, пока не будет найдена и устранена причина.
Следует отметить, что от точности определения входного сопротивления антенны в значительной степени зависит успех всей работы по созданию СУ. Поэтому нужно стремиться к минимальной погрешности измерений. Погрешность измерения активной и реактивной компонентов входного сопротивления антенны в 3 – 5% может считаться хорошей, - 10% - приемлемой, а 15 – 20% недопустимо большой.
Другим способом получения исходных данных для разработки СУ может быть расчет.
В настоящее время есть несколько компьютерных программ моделирования антенн ориентированных на радиолюбителей. Это MMANA, NEC4WIN, MININEC, NEC2, SuperNEC и др.
Наиболее популярна, по моему мнению, MMANA.
С ее помощью любой радиолюбитель может промоделировать расчетным способом антенну, которую он хотел бы построить. В результате он получит коэффициент усиления, диаграмму направленности, активную и реактивную компоненты входного сопротивления, КСВ в питающем фидере и некоторые другие характеристики модельной антенны.
В радиолюбительских средствах информации и в эфире на протяжении последних лет появляются противоречивые отзывы о точности расчетов, выполненных программой MMANA - от восторженных до весьма критических. И те, и другие бывают очень убедительны. Однако я бы отметил, что негативные результаты получаются в случаях моделирования антенн в нетипичных условиях или при ошибках в исходных данных. Например, при очень низком (по отношению к длине волны или длине антенны) расположении антенны над землей, при неудачном разделении антенны на расчетные сегменты и т.п.
При соблюдении известных ограничений на расчетную модель (антенну), результаты расчетов по программе MMANA получаются вполне вразумительными и похожими на истину. Во многих случаях любительской практики результаты таких расчетов получили хорошее экспериментальное подтверждение.
Воспользуемся и мы для примера разработки СУ расчетами, которые выполним с помощью программы MMANA. Рассчитаем треугольную рамочную антенну с периметром 30,86м + 30,91м + 30,91м из медного провода диаметром 1,7 мм, поднятую на 20 метров над землей с удельной проводимостью 5 мСим/м и относительной диэлектрической проницаемостью 13. Точка подключения фидера - линии с волновым сопротивлением 75 Ом - вершина одного из углов.
Нужно учитывать, что при расчете входного сопротивления антенн в MMANA предполагается, что земля идеальна, т.е. имеет равное нулю удельное сопротивление. Реальная земля такими свойствами не обладает и поэтому в результат расчета входит методическая погрешность, которая тем меньше, чем выше высота подвеса антенны над землей. Пренебрежимой такая погрешность может считаться при высоте подвеса более

где:
![]() –
высота подвеса, м
–
высота подвеса, м
![]() –
длина волны, м.
–
длина волны, м.
Для получения корректных результатов в диапазоне 3,5 МГц и более высокочастотных, высота антенны над землей должна быть больше 13,6м.
Диаграммы направленности и коэффициенты усиления моделируемой антенны для разработки СУ не имеют значения, а активная Ra и реактивная Xa части входного сопротивления необходимы.
Графики полученных зависимостей Ra и Xa от частоты приведены на Рис.2.
Рис. 2. Графики зависимости компонентов входного сопротивления антенны от частоты
Легко заметить, что график отражает несколько явно выраженных чередующихся резонансов, подобных резонансам последовательного и параллельного колебательных контуров.
Это совпадает с физическими представлениями о процессах, происходящих в антенне, которая, по сути, представляет собой электрическую систему с распределенными параметрами – длинную линию.
На частотах последовательного резонанса активное сопротивление Ra принимает минимальное значение (провал на графике), а реактивное сопротивление Xa - нулевое значение, пересекая ось частот от отрицательных (емкостных) значений к положительным (индуктивным). На частотах параллельного резонанса Ra принимает максимальное значение, а Xa - нулевое значение, пересекая ось частот, наоборот, от положительных индуктивных значений к отрицательным - емкостным.
Резонансные частоты и величины входных сопротивлений антенны на этих частотах сведены в Таблицу 1.
Таблица 1
|
Fпосл., МГц |
Ra, Ом |
Fпар., МГц |
Ra, Ом |
|
|
|
|
|
|
3,35 |
132,81 |
4,74 |
2948,23 |
|
6,62 |
292,37 |
8,02 |
4344,85 |
|
13,11 |
241,77 |
14,42 |
2322,18 |
|
19,58 |
161,73 |
20,95 |
3219,68 |
|
22,86 |
285,20 |
24,11 |
1874,29 |
|
26,01 |
276,02 |
27,35 |
2588,33 |
|
29,29 |
184,97 |
30,63 |
2657,92 |
На резонансных частотах характеристики антенны сильно изменяются: значительно возрастает или снижается активное сопротивление Ra, изменяется от емкостного к индуктивному (или наоборот) характер сопротивления Xa. Это усложняет реализацию СУ.
Для преодоления этой трудности напрашивается следующий, казалось бы, парадоксальный вывод: для работы антенны совместно с многодиапазонным СУ желательно применять такую антенну, которая не будет иметь ни последовательного, ни параллельного резонанса, ни на одном из любительских диапазонов частот.
Парадокс состоит в том, что, при разработке антенны, любители, наоборот, стараются настроить ее в резонанс.
Этими соображениями определяется выбор частоты основного резонанса модели антенны. Из Таблицы 1 видно, что эта частота составляет 3,35 МГц. К сожалению, несмотря на попытку оптимального выбора частоты основного резонанса, все же не удалось избавиться от последовательного резонанса в диапазоне 10 м на частоте 29,29 МГц.
Проблема заключается в том, что, как видно из таблицы, разница между соседними последовательным и параллельным резонансами составляет около 1,4 МГц, а ширина любительского диапазона 10м – 1,7 МГц. Поэтому, как бы мы ни выбирали частоту основного резонанса в районе 3,35 МГц, все равно в диапазоне 10 м получим хотя бы один резонанс.
Если же выбрать частоту основного резонанса 3,4 МГц, при которой межрезонансный интервал составит как раз около 1,7 МГц и последовательный резонанс смещается на 29,75 МГц, то получим последовательный резонанс на 21,2 МГц, что с моей точки зрения еще хуже, чем в первом варианте. Существенно укорачивать антенну не хотелось бы из-за снижения ее эффективности. Выбор оптимальной резонансной частоты довольно кропотливая работа требующая значительных затрат времени для моделирования и анализа, оставим ее заинтересованному читателю.
Если резонансные частоты антенны, благодаря описанному выбору частоты основного резонанса, находятся вне любительских диапазонов, то изменения Ra и Xa внутри диапазонов происходят монотонно без экстремумов (отсутствуют «горки» и «впадины») и, наоборот, при наличии резонанса – с экстремумом.
В качестве примера на Рис. 2 приведены графики зависимости Ra и Xa от частоты в диапазоне 3,5 МГц, а на Рис. 3 – в диапазоне 28 МГц. На Рис. 3 видно, что Xa пересекает ось частот в около частоты 29,29 МГц, при этом Ra принимает минимальное значение.
Для упрощения задачи и благодаря малой относительной ширине любительских диапазонов, примем решение о приемлемости точного согласования антенны и фидера только на одной частоте в каждом любительском диапазоне за исключением диапазона 10м. При этом предполагаем, что благодаря отсутствию резонансов в пределах диапазона, согласование на других частотах диапазона останется удовлетворительным. Для проверки такого предположения рассчитаем Г-образные цепочки согласования для нашей антенны в диапазонах 14МГц и 24МГц.
Для диапазона 14МГц применим LC цепочку с L = 4,31мкГн и C = 30,7 пФ, а для диапазона 24МГц – с L = 2,07 мкГн и C = 12,2 пФ.
Графики зависимости КСВ в этих диапазонах от частоты приведены на Рис. 4 и Рис. 5.
Рис. 2. График зависимости компонентов входного сопротивления
антенны от частоты в диапазоне 80м
Рис. 3. График зависимости компонентов входного сопротивления
антенны от частоты в диапазоне 10м

Рис. 4. График зависимости КСВ от частоты в диапазоне 20 м с
Г-образным согласующим звеном
Рис. 5. График зависимости КСВ от частоты в диапазоне 12м с
Г-образным согласующим звеном
Видно, что согласование в пределах диапазона получается удовлетворительным.
Казалось бы, на этом решение задачи можно и заканчивать. Определив для середины каждого диапазона компоненты входного сопротивления антенны, нужно рассчитать для каждого диапазона согласующую Г-образную цепочку, поставить все цепочки межу фидером и антенной и получить желаемое согласование на всех диапазонах.
К сожалению, так просто задача не решается. Как бы мы ни соединяли цепочки, они будут так влиять друг на друга, что согласования не получится.
Есть два выхода из создавшейся ситуации: переключать согласующие цепочки с помощью реле или рассчитать такие цепочки, чтобы, несмотря на взаимное влияние их друг на друга, согласование все-таки происходило.
Как уже было сказано выше, первый из этих вариантов нас не устраивает.
Поэтому будем синтезировать согласующий четырехполюсник.
Вообще при разработке электрических схем могут решаться две разные задачи.
Первая, более простая, состоит в том, чтобы проводить анализ схемы. На основе интуиции, обобщения опыта работы, расчетных оценок или еще как-то создается первое приближение схемы, выбираются значения ее элементов, и производится анализ. В результате анализа получаются данные о том, как работает эта схема: величины токов, напряжений, времена процессов, резонансные или иные частоты и др. Сравниваются эти результаты с заданием (с пожеланиями) и, если схема работает не так как нужно, то в нее вносятся изменения и проводится повторный анализ. Так продолжается до тех пор, пока не будет получен желаемый результат.
Вторая задача состоит в том, чтобы, имея тем или иным образом формализованное задание (математическое выражение выполняемых функций, набор графиков, характеристик), целенаправленно действуя по определенному алгоритму, создавать (синтезировать) именно ту схему, которая сразу будет обладать требуемыми свойствами.
Вторая задача сложнее и даже теоретически не имеет решения на все случаи жизни, а решена только для некоторых типов схем. Это двухполюсники, четырехполюсники в приложении к фильтрам, согласующим устройствам и некоторые другие.
Хотя формально для решения задачи согласования фидера и антенны необходим четырехполюсник – два вывода подключаются к фидеру и два к антенне, мы будем пользоваться принципами синтеза двухполюсников, как более простыми. Согласующий четырехполюсник будет состоять из двух двухполюсников. Один из них будет подключен между фидером и антенной, а второй параллельно выводам антенны. Схематически это изображено на Рис. 6.
где: ДП – двухполюсник
Рис. 6. Схема подключения согласующих элементов
Функции двухполюсников в схеме сильно различаются.
Задача, решаемая двухполюсником ДП2, состоит в приведении величины активного сопротивления Ra к величине волнового сопротивления фидера ρ. При этом абсолютная величина реактивного сопротивления Xa может не только не уменьшится, но даже увеличится.
Задача двухполюсника ДП1 - в приведении к нулю реактивного сопротивления Xm, которое получилось после подключения к антенне ДП2. При этом величина активного сопротивления Rm = ρ, которая получилась после подключения ДП2, должна остаться неизменной.
Если удастся синтезировать такие двухполюсники, то задача многодиапазонного согласования нерезонансной КВ антенны будет решена.
Синтез реактивных двухполюсников будем вести на основе известных теоретических выкладок [5].
Нас интересует именно реактивный двухполюсник, состоящий только из емкостей и индуктивностей и не содержащий активных сопротивлений. В таком двухполюснике не происходит потерь энергии и КПД системы фидер – СУ – антенна получается наивысшим.
Правда, идеальных емкостей и индуктивностей не бывает. Реальные элементы схем имеют неустранимые потери энергии, но чем выше добротность катушек индуктивности и меньше тангенс угла потерь конденсаторов, тем выше будет КПД и точнее результаты проектирования СУ.
После решения задачи синтеза двухполюсника из идеальных компонентов весьма полезно провести математическое моделирование СУ, например, с помощью программы RFSim99, с указанием реализуемых на практике потерь и посмотреть насколько ухудшатся характеристики согласования.
Теория решает задачу синтеза двухполюсника, исхдя из знания аналитического выражения (формулы) функции цепи (по сути входного сопротивления). Несмотря на то, что у нас нет такой формулы, теория нам сильно поможет, т.к. она определяет общий вид схем синтезируемых реактивных двухполюсников.
Входное сопротивление двухполюсника может описываться выражением
 (1)
(1)![]()
где:
![]() –
входное сопротивление
–
входное сопротивление
![]() –
круговая частота,
–
круговая частота,
![]()
![]() –
частота
–
частота
![]() –
индуктивность
–
индуктивность
![]() –
емкость
–
емкость
![]() –
резонансная частота параллельного колебательного контура.
–
резонансная частота параллельного колебательного контура.
Входная проводимость двухполюсника может описываться выражением
![]() +
+ (2)
(2)
где:
![]() –входная
проводимость
–входная
проводимость
![]() –
круговая частота,
–
круговая частота,
![]()
![]() –
частота
–
частота
![]() –
индуктивность
–
индуктивность
![]() –
емкость
–
емкость
![]() –
резонансная частота последовательного контура.
–
резонансная частота последовательного контура.
Эти формулы соответствуют двум вариантам схемного исполнения двухполюсников, изображенным на Рис. 7 и Рис. 8.

Рис. 7. Схема двухполюсника, соответствующая формуле (1)
Рис. 8. Схема двухполюсника, соответствующая формуле (2)
На Рис. 7 видно, что индуктивность L определяет сопротивление двухполюсника на верхних частотах. Сопротивления емкостей С, С3, С4,…Сn при возрастании частоты стремятся к нулю, а сопротивление индуктивности L растет. Поэтому ток, протекающий на верхних частотах, определяется, в основном, сопротивлением индуктивности, что и показывает формула (1).
На низких частотах сопротивления индуктивностей L, L3, L4, …Ln, наоборот, малы. Ток будет определяться сопротивлением емкости С.
На промежуточных частотах ток через двухполюсник, изображенный на Рис. 7 будет определяться совместным действием L, C и колебательных контуров L3C3, L4C4, L5C5,…LnCn. При этом влияние колебательных контуров на входное сопротивление двухполюсника будет особенно сильно проявляться вблизи резонансной частоты каждого из контуров.
Все сказанное относится и к схеме на Рис. 8, с той лишь разницей, что говорить нужно не о сопротивлениях, а о проводимостях. И влияние на проводимость на низких частотах будет оказывать, в основном, индуктивность L, а на высоких – емкость С.
Приведенные схемы, при определенном выборе величин элементов, могут иметь одинаковые входные сопротивления, в этом случае схемы эквивалентны.
Применение той или иной схемы определяется удобством и возможностью реализации рассчитанных компонентов.
Для расчетов более удобно использовать проводимости при параллельном подключении к внешней цепи или сопротивления – при последовательном, т.к. в этих случаях, для определения суммарного действия просто применяется операция сложения. На практике трудно реализовать емкости величиной менее десятых долей пикофарады или индуктивности менее единиц наногенри. Если при расчете получаться такие величины элементов, то изменение схемы двухполюсника и новый расчет могут помочь решить проблему.
Количество элементов в двухполюсниках ДП1 и ДП2 зависит от количества точек точного согласования антенны с фидером.
Если нужно провести согласование только на двух диапазонах и по одной точке на каждом из них, то можно обойтись двумя элементами - L и C в каждом из двух двухполюсников. Если нужно согласование в трех точках на двух диапазонах или в трех точках на трех диапазонах, то придется использовать схему из L, C, L3C3. Если в пяти точках – L, C, L3C3, L4C4, L5C5 и т.д. (Нумерация элементов в тексте по Рис. 7 и Рис. 8.) Схемы таких СУ изображены на Рис. 9.
|
|
|
|
СУ для двух точек согласования СУ для трех точек согласования
|
|
СУ для пяти точек согласования
Рис. 9. Варианты схем СУ
Для разрабатываемого СУ применим согласование в девяти точках любительских диапазонов на частотах 3,65; 7,05; 10,125; 14,2; 18,2; 21,2; 25; 28,5; 29,5 МГц. Схема согласования получается довольно громоздкой и будет приведена ниже.
Определим значения элементов двухполюсника ДП2.
Для этого необходимо составить и решить систему из девяти уравнений с девятью неизвестными.
Основой для системы уравнений может служить равенство вещественной части входного сопротивления, соединенных параллельно входных сопротивлений антенны и ДП2, волновому сопротивлению фидера. Как указывалось выше, это главное назначение ДП2.
Математически это выглядит так:
![]()
 (3)
(3)
где:
![]() -
комплексное входное сопротивление антенны
-
комплексное входное сопротивление антенны
![]() -
комплексная входная проводимость ДП2
-
комплексная входная проводимость ДП2
![]() -
волновое сопротивление фидера.
-
волновое сопротивление фидера.
Система уравнений, в сокращенной записи, выглядит так:


.
.
.

В этой системе уравнений
известны следующие величины:![]()
![]() ,
,
![]() ,
…
,
…![]() -
круговые частоты, на которых производятся точные согласования,
-
круговые частоты, на которых производятся точные согласования,
![]() - вещественная и мнимая компоненты входного сопротивления антенны в точках
точного согласования,
- вещественная и мнимая компоненты входного сопротивления антенны в точках
точного согласования,
![]() -
волновое сопротивление фидера,
-
волновое сопротивление фидера,
![]() .
.
Неизвестны
индуктивности
![]() ,
,
![]() ,
,![]() ,
,![]() ,
,![]() ,
,![]() ,
,![]() ,
,![]() ,
,![]() .
.
![]() ,
,
![]() ,
…
,
…![]() -
частоты настройки последовательных колебательных контуров, подключенных
параллельно антенне. Эти частоты необходимо выбрать. Их нужно выбирать между
частотами точного согласования. Для начала можно руководствоваться знаком мнимой
части входного сопротивления антенны, если входное сопротивление в точке
согласования емкостное (отрицательное), то последовательный контур следует
настроить выше точки согласования и наоборот.
-
частоты настройки последовательных колебательных контуров, подключенных
параллельно антенне. Эти частоты необходимо выбрать. Их нужно выбирать между
частотами точного согласования. Для начала можно руководствоваться знаком мнимой
части входного сопротивления антенны, если входное сопротивление в точке
согласования емкостное (отрицательное), то последовательный контур следует
настроить выше точки согласования и наоборот.
Решать такую систему комплексных уравнений вручную едва ли разумно и возможно. Поэтому нужно воспользоваться математическим комплексом (пакетом) программ решающим такие системы уравнений, например, Mathcad.
Система уравнений сложная и не обязательно имеет решение при любых исходных данных. Поэтому, при решении, очень вероятно придется варьировать частоты настройки контуров.
После решения системы будут определены значения индуктивностей, но для колебательных контуров нужно определить еще и емкости. Это делается по известной формуле:
 .
.
В результате расчета для промоделированной выше антенны получились величины элементов контуров и частот их настройки, приведенные в Таблице 2.
Таблица 2
|
Частота
|
5000001 |
8500001 |
12000001 |
16000001 |
19500001 |
23000001 |
30000001 |
33000001 |
|
Индуктив-ность, мкГн |
7,25 |
20 |
11,4 |
14,3 |
27,7 |
18 |
19,4 |
6,8 |
|
Емкость, пФ |
140 |
17,5 |
15,4 |
6,92 |
2,4 |
2,67 |
1,45 |
3,42 |
Величина L получилась равной 23 мкГн.
После проведения расчета величин элементов двухполюсника ДП2 очень полезно проверить правильность решения системы уравнений. Для этого нужно подставить в левую часть уравнений все, теперь уже известные, величины. В результате должны получиться действительные (активные) части входного сопротивления равными волновому сопротивлению фидера.
|
Частота, МГц |
3,65 |
7,05 |
10,125 |
14,2 |
18,2 |
21,2 |
25 |
28,5 |
29,5 |
|
Rm, Ом |
75 |
75,002 |
75,002 |
75 |
75 |
75 |
75 |
75 |
75 |
|
Xm, Ом |
-214 |
202 |
196 |
385 |
508 |
487 |
325 |
-338 |
-139 |
После подстановки получились результаты, помещенные в Таблицу 3.
Таблица 3
Из таблицы видно, что действительные части входного сопротивления получились равными 75 Ом, что и закладывалось в расчет.
На этом этапе проектирования СУ полезно также проверить полученные результаты другим программным средством. Для этой цели можно применить, например, RFSim99 или программу MMANA. После введения в них схемы ДП2 с рассчитанными значениями L и C и расчета, должны получиться приведенные в Таблице 3 величины Rm и Xm.
Данные, приведенные в таблице, проверены c помощью RFSim99. Результат сравнения – хорошее совпадение. Использование программы MMANA, хотя и несколько сложнее, но дает «сквозную» проверку – расчет согласования вместе с расчетом антенны.
После расчета элементов ДП2 можно переходить к ДП1.
Принцип расчета практически такой же. Отличие состоит в том, что теперь мы будем оперировать мнимыми, а не действительными сопротивлениями.
![]()
![]() (4)
(4)
где:
![]()
![]() -
входное сопротивление ДП1
-
входное сопротивление ДП1
![]()
![]() -
сопротивление системы после подключения ДП2, до подключения ДП1.
-
сопротивление системы после подключения ДП2, до подключения ДП1.
В правой части уравнения (4) стоит «0» т.к. в режиме согласования, мнимой части сопротивления быть не должно.
В результате опять получаем систему девяти уравнений с девятью неизвестными.

.
.
.

Решаем систему аналогично ранее рассмотренной. В результате получаем величины индуктивности и емкостей двухполюсника ДП1 (Таблица 4). Значения индуктивностей параллельных контуров рассчитываем по формуле аналогичной приведенной выше для емкостей.
Таблица 4
|
Частота
|
3400001 |
6060001 |
8000001 |
12000001 |
16000001 |
19500001 |
23000001 |
29000001 |
|
Емкость, пФ |
263 |
30 |
38,7 |
36,5 |
47,1 |
109 |
138 |
1078 |
|
Индуктив-ность, мкГн
|
8,34 |
23,1 |
10,2 |
4,8 |
2,1 |
0,61 |
0,35 |
0,028 |
Величина L получилась равной 6,34 мкГн.
В результате мы получили значения всех элементов схемы согласующего устройства. Схема с номинальными величинами элементов приведена на Рис. 10
|
|
||||
Рис. 10. Схема согласующего устройства для антенны
Для подтверждения правильности расчетов проведено математическое моделирование СУ с помощью программы RFSim99.
Отпечатки с экранов приведены на Рис. 11, Рис. 12.
На Рис. 12 видно, что практически точное согласование произошло на частоте 3,648 МГц, что лишь на 2 кГц ниже расчетной частоты и может считаться вполне удовлетворительным. При этом входное сопротивление СУ со стороны фидера составляет 74,92+0,14i Ома, что также очень не плохо.
Результаты контрольных расчетов СУ приведены в Таблице 5.
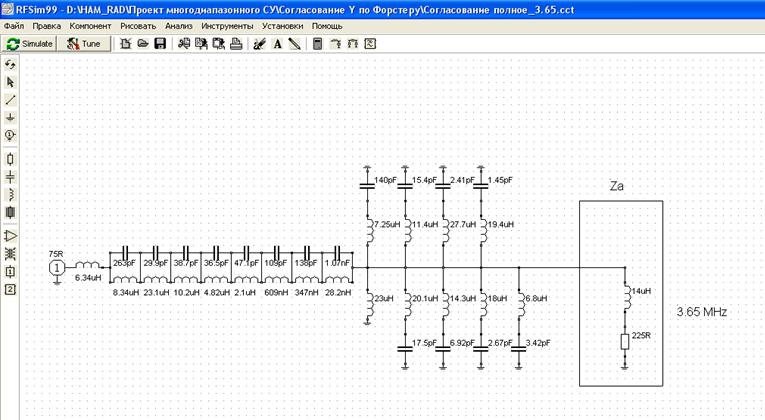
Рис. 11. Расчетная схема для моделирования СУ на 3,65 МГц
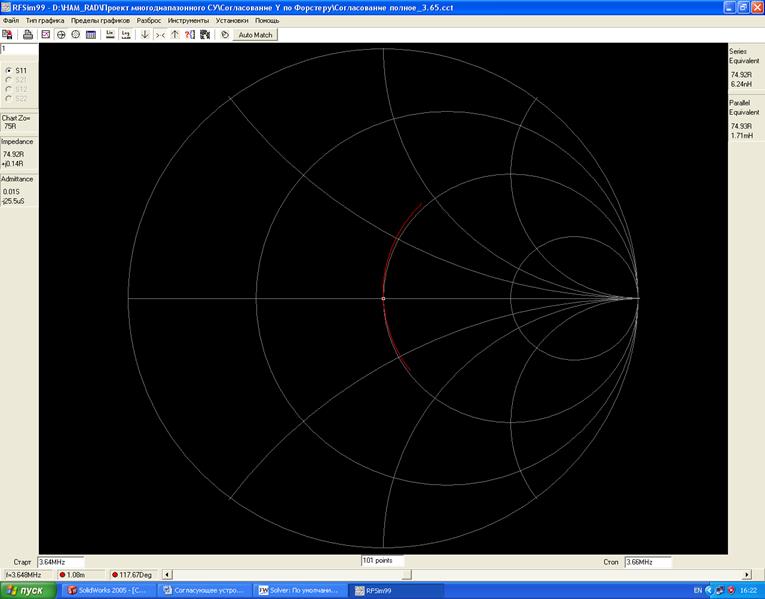
Рис. 12. Результат моделирования СУ
|
Частота, МГц |
3,648 |
7,053 |
10,126 |
14,203 |
18,202 |
21,196 |
24,992 |
28,492 |
29,5 |
|
R, Ом |
74,92 |
76,54 |
75,61 |
74,51 |
78,51 |
79,51 |
76,76 |
76,46 |
80,96 |
|
X, Ом |
0,14 |
0,38 |
-0,51 |
0,07 |
-0,53 |
0,41 |
0,11 |
0,19 |
-0,25 |
|
КСВ ~ |
1,001 |
1,02 |
1,008 |
1,007 |
1,05 |
1,06 |
1,02 |
1,02 |
1,08 |
Таблица 5
Как видно из Таблицы 5 согласование антенны с фидером в точках расчетного согласования вполне приемлемое для радиолюбительской практики.
Реальное согласование будет несколько хуже из-за влияния потерь в катушках индуктивности и конденсаторах. Поэтому, при реализации, желательно применять катушки с высокой добротностью и качественные конденсаторы.
Таким образом, задача синтеза четырехполюсника, для согласования антенны с фидером на всех КВ диапазонах решена.
Следует учитывать, что схема СУ и номиналы элементов относятся к конкретной антенне – треугольной рамке с периметром 30,86 + 30,91 + 30,91м на высоте 20м, с резонансной частотой 3,35 МГц. Для других антенн и схема и номинальные значения элементов могут значительно отличаться от приведенных, поэтому требуется проведение новых измерений и расчетов.
Кроме описанных, есть и другие варианты математического описания двухполюсников и другие схемы их реализации, но они выходят за рамки этой статьи.
Перечислим кратко последовательность действий, которые надо выполнить для самостоятельного проектирования СУ.
· Выбрать антенну для реализации
· Выбрать диапазоны и частоты точного сопряжения
· Измерить или рассчитать активную и реактивную части входного сопротивления антенны в точках сопряжения
· Выбрать схемы двухполюсников ДП1 и ДП2
· Выбрать частоты настройки колебательных контуров в ДП2
· Составить и решить систему уравнений для определения элементов ДП2
· Проверить правильность решения путем моделирования работы антенны с ДП2
· Выбрать частоты настройки колебательных контуров в ДП1
· Составить и решить систему уравнений для определения элементов ДП1
· Проверить правильность решения путем моделирования работы антенны с ДП1 и ДП2
· Собрать электрический макет СУ, подстраивая резонансные частоты колебательных контуров, в соответствии со значениями, принятыми в расчетах
· Нагрузив макет СУ RL или RC цепочками – эквивалентами антенны на частотах согласования, проверить правильность согласования
· Собрать рабочий вариант СУ, настроить колебательные контуры, обеспечить стабильность элементов, их взаимного положения, минимизацию магнитной связи между катушками и герметизацию
· Проверить согласование на эквивалентах антенны на всех частотах точного согласования
· Присоединить антенну, фидер и поднять антенну, СУ, фидер на рабочую высоту
· Тщательно проверить согласование, как на частотах точного согласования, так и на других частотах в каждом из диапазонов
· При положительном результате начать эксплуатацию антенны, иначе разбираться, в чем проблемы.
В завершение автор приносит благодарность за участие в обсуждении на форуме Radio-Antenna-PRO (Hertz Group) http://groups.yahoo.com/group/Hz/ вопросов, связанных с разработкой СУ Игорю Гончаренко DL2KQ, Сергею Носакову UA6LGO, Константину Попандопуло UR5FFC.
Особую благодарность автор приносит Александру Юркову RA9MB, высказавшему плодотворную мысль о синтезе СУ на основе двухполюсников с последующим объединением их в четырехполюсник.
Использованные источники.
Автор: Чучко Виталий Федорович, 607190 г. Саров Нижегородской обл. ул. Березовая 8 кв. 9., д.т. (83130)9-16-27, сл.т. (83130)4-50-42. Позывной сигнал RZ3TJ. E-mail: rz3tj@mail.ru