AVR BASIC interpreter
|
| Keyword | Description | Small Atmega16 |
Mini Atmega32 |
Maxi Atmega64 |
|---|---|---|---|---|
| Returns absolute value of an expression result | * | * | * | |
| Reads meassured value from the current channel ADC | * | * | * | |
| AT | Sets the position of the printing symbol for PRINT operator | * | * | |
| ATTR | Sets the console output attributes | * | * | |
| BCD | Puts to the console a value in BCD form | * | * | |
| BIN | Puts to the console a value in BIN form | * | * | |
| CHR | Sends symbol to the console by symbol code that is result of expression. CHR is an element of the output list for PRINT operator |
* | * | * |
| CLEAR | Sets pin logic level to zero | * | * | * |
| CLS | Clears the screen and move cursor to top left corner | * | * | |
| DATA | Specifies constant values to be read by READ operator | * | * | * |
| DEFPIN AS | Defines the pin function of the controller pins | * | * | * |
| DELAY | Forms delay | * | * | * |
| DELETEVECTOR | Disconnects the a handler code from vector and disables corresponding interrupt | * | * | |
| DIM | Defines an array size | * | * | * |
| DISABLE | Disables interrupts | * | * | |
| ENABLE | Enables interrupts | * | * | |
| END | Finishes the program execution | * | * | * |
| FOR TO NEXT | Loop operator | * | * | * |
| GETATOMIC | Gets value from a variable used in an interrupt | * | * | |
| GOTO | Unconditional branch | * | * | * |
| GOSUB | Calls subroutine | * | * | * |
| HEX | Puts to the console a value in hexadecimal form | * | * | |
| HIGH | Returns high byte of expression result | * | * | * |
| IF THEN ELSE | Condition branch operator | * | * | * |
| INK | Sets the symbol color | * | * | |
| INKEY | Checks the console buffer for the received symbols | * | * | * |
| INLINE | Creates block of machine code | * | * | |
| INPUT | Waits for input value | * | * | * |
| INTERRUPT | Creates the block of a machine code at a stage of program loading. Connects a code to a vector at a stage of execution |
* | * | |
| LASTERROR | Returns last error or critical situation code | * | * | * |
| LOW | Returns low byte of expression result | * | * | * |
| PAPER | Sets the background color | * | * | |
| PEEK | Reads byte from memory or I/O port | * | * | * |
| POKE | Writes byte to memory or I/O port | * | * | * |
| Prints the messages and the values on the console | * | * | * | |
| PULSEIN | Returns pulse width on the controller pin | * | * | * |
| PULSEOUT | Forms pulse on the pin | * | * | * |
| PUTATOMIC | Assigns value of variable used in interrupt subroutine | * | * | |
| PWM | Puts a digital value out to the PWR channel | * | * | * |
| READ | Reads DATA and moves pointer to next point | * | * | * |
| READEEPROM | Reads byte from the address in EEPROM | * | * | * |
| REM | Comments line. Interpreter skips the rest of code in this line | * | * | * |
| RESTORE | Allows read the DATA block more than one time. Sets the pointer at the needed labeled block of data |
* | * | * |
| RETURN | Returns from subrouting | * | * | * |
| ROL | Shifts value of variable left. The LSB is set to 0 | * | * | * |
| ROR | Shifts value of variable right. The MSB is set to 0 | * | * | * |
| SCALE | Performs the scaling of variable | * | * | * |
| SETADMUX | Sets the analog multiplexer up | * | * | * |
| SET | Sets pin logic level to one | * | * | * |
| SHIFTIN | Returns the incoming sequence of bits | * | * | * |
| SHIFTOUT | Outputs contents of a variable as sequence of bits | * | * | * |
| STOP | Stops the program execution, clears receiving buffer, starts after getting new symbol in the input buffer |
* | * | * |
| TEST | Reads pins logic level | * | * | * |
| TOGGLE | Switches pin logic level to the inverted state | * | * | * |
| TWIINIT | Iinitializes TWI (I2C) | * | * | * |
| TWIREAD | Reads byte from TWI (I2C) device. ACK/NACK generate | * | * | * |
| TWISTOP | Generates STOP condition on SDA and SCL pins | * | * | * |
| TWIWRITE | Sends byte to TWI (I2C) device | * | * | * |
| WAITKEY | Is waiting for a single symbol. Returns the code of received symbol | * | * | * |
| WRITEEEPROM | Writes byte to the address in EEPROM | * | * | * |
|
|
|
|
Base crystal |
|
|
|
Flash Size |
3К bytes |
16К bytes |
To be defined |
2.1 CONSOLE INPUT/OUTPUT
Action:
Clears the screen and move cursor to top left corner
Syntax:
CLS
Action:
Prints the message on the console
Syntax:
PRINT [output list]
The elements of the output list can be separated by semicolon that
allows output more than one variables or strings at one line without spaces between the elements.
Semicolon at the end of the line cancels adding CR and LF.
The elements of the output list can be separated by comma that inserts number of spaces to set
output to the next position of tabulation.
Comma at the end of the line cancels adding CR and LF.
Examples:
| Line feed | |
| PRINT “This message” | printed: This message |
| PRINT “X=”;X; “ Y=”;Y; | printed: X=(value of X) Y=(value of Y) |
| PRINT X,Y,Z, | (value of X) (value of Y) (value of Z) |
Action:
Sets the position of the printing symbol for PRINT operator
Syntax:
PRINT AT(x,y);[list]
x – row position (from 1 to 80)
y – column position (from 1 to 24)
Example:
| PRINT AT(35,12);“This msg”; AT(1,1); | Print "This msg" in the center of the screen and set cursor to the left/up corner |
Action:
Sends symbol to the console by its code that is result of expression. Using with PRINT operator
Syntax::
PRINT [list1; or ,] CHR(val)[; or , [list2]]
val – symbol code from 0 to 255. All another integer values will be got as a low byte of word
Example:
| FOR I=32 TO 127 PRINT I,CHR(I) NEXT |
Print symbol codes and symbol itself |
Action:
HEX – puts to the console a value in hexadecimal form,
BCD - puts to the console a value in BCD form,
BIN - puts to the console a value in BIN form.
Functions HEX, BCD, BIN are the elements of output list for PRINT operator.
Синтаксис:
PRINT [list1; or ,] HEX(value, digits)[; or , [list2]]
PRINT [list1; or ,] BCD(value, digits)[; or , [list2]]
PRINT [list1; or ,] BIN(value, digits)[; or , [list2]]
value – value or expression
digits – number of printed digits
Example:
| 10 INPUT X PRINT X,HEX(X,4);BIN(X,16) GOTO 10 |
Print value in different formats |
Action:
Prints attributes setting
Syntax:
ATTR expression
An expression defines output attributes:
0 – standard brightness
1 – more light brightness
4 – underscore
5 – blinking
7 – color inverting
8 – set color of symbol and background the same
Action:
Sets color attributes for console output
INK – sets the symbol color
PAPER – sets the background color
Syntax:
INK expession
PAPER expession
An expession defines the color
0 – black
1 – red
2 – green
3 – yellow
4 – blue
5 – magenta
6 – cyan
7 – white
Note. Using AT, CLS, ATTR, PAPER, INK allows change attributes on ANSI terminal, as console. Most terminals program can support this mode.
Action:
Waits for input value. Puts value to the variable after receiving CR
Syntax:
INPUT ["Invite msg",] variable
Examples:
| INPUT X | Print “?” and wait for value |
| INPUT “X=”,X | Print X= and wait for value |
Action:
Checks console buffer for the received symbols. Return –1 if empty and symbol’s code if not.
Syntax:
Variable = INKEY()
Examples:
| A=INKEY() | Read buffer |
10 C=INKEY() |
Wait for a symbol |
|
Waiting for symbol and doing something background |
Action:
Is waiting for a single symbol. Returns the code of received symbol.
Syntax:
Variable = WAITKEY()
Examples:
| A=INKEY() | Wait for symbol |
2.2 PROCESS CONTROL OPERATORS
Action:
Condition branch operator
Should be written in one line only.
Syntax:
IF condition THEN operator1 [ELSE operator2]
Examples:
| IF X<10 THEN X=X+1 | If true then expression |
IF X=0 THEN GOTO 100 ELSE GOTO 200 |
|
IF Z=65 THEN GOSUB 200 |
If true then call subroutine on label 200 |
Action:
Loop operator
Syntax:
FOR Variable = expression1 TО expression 2
some repeating actions
NEXT
Note. Step = 1 always
Examples:
FOR I=32 TO 127 |
Print symbols with code from 32 to 127 |
Action:
Unconditional branch
Syntax:
GOTO label
Example:
GOTO 100 |
Action:
Calls subroutine
Syntax:
GOSUB label
Example:
| GOSUB 100 |
Action:
Returns from subrouting
Syntax:
RETURN
Example:
100 PRINT X |
Action:
Finishes the program execution
Syntax:
END
Examples:
IF Z=0 THEN END |
|
Action:
Stops the program execution, clears receiving buffer, starts after getting new symbol in the input buffer
Syntax:
STOP
Examples:
IF Z=0 THEN STOP |
Action:
Comments line. Interpreter skips the rest of code in this line.
Syntax:
REM [any string]
operator : REM [any string]
Examples:
REM any text |
Do nothing in this line of program |
| A=10: REM any text | Does only operator before REM |
Action:
Forms delay 1..65535 mSec
Syntax:
DELAY expression
Examples:
DELAY 100 | Forms delay 100 mSec |
2.3 DATA
Action:
Defines an array size
Syntax:
DIM list
Note:
Maximum size of array depends of available memory and controller type
|
|
|
|
Base crystal |
|
|
|
Size of available memory |
140 bytes/ |
1000 bytes/ |
To be defined |
Examples:
| DIM A(10),B(20) | Array A – reserved memory for 10 elements
|
Action:
Specifies constant values to be read by READ operator.
Note that max length of data line cannot be more than 64 symbols per 1 line.
Max lines of data limited only of available flash memory.
Syntax:
DATA list
Pointer sets to begin of first data block when program starts
Examples:
| DATA 9999, -1, 23456 |
Action:
Reads DATA and moves pointer to next point
Syntax:
READ list
Example:
| READ A,B,C |
Action:
Allows read the DATA block more than one time. Sets the pointer at the needed labeled block of data.
Syntax:
RESTORE [label]
RESTORE without parameters sets pointer to begin of the first data block.
Examples:
| 100 DATA 1,2,3,4,5,6 DATA 7,8,9 110 DATA 555,777,888 …. RESTORE 110
|
Set pointer to DATA value 555
|
| RESTORE | Set pointer to DATA value 1 |
Action:
Writes byte to the address in EEPROM
Syntax:
WRITEEEPROM address, byte
Action:
Reads byte from the address in EEPROM
Syntax:
Variable = READEEPROM(address)
|
Small |
Mini |
Maxi |
Base crystal |
ATMEGA16 |
ATMEGA32 |
ATMEGA64 |
Size of EEPROM, byte |
512 |
1024 |
2048 |
2.4 INTERRUTS and MACHINE CODE
Action:
Enables interrupts
Syntax:
ENABLE
Action:
Disables interrupts
Syntax:
DISABLE
Action:
Creates block of machine code on program downloading stage.
A few lines of INLINE in any place of program create consequtive block of a code in special area of memory.
If the block of a code is formed by several lines INLINE,
it is necessary to take care, that interpreter will look only on first of them. The rest of INLINEs
should be hidden after operators RETURN or GOTO
The block of a code should be issued as the subroutine, last operator should be operator RET.
Communication with BASIC variables is simple, registers R16, R17 contain the pointer to variable A.
A principle of formation of the address of any of 26 (from A up to Z) scalar variables following:
Address = value of R16R17 + 2 * (symbol code - 65)
Синтаксис:
INLINE opcode1, opcode2….
Example:
| 10 INLINE opcode1, opcode2…. | Simple case, code block is formed by single operator INLINE |
| 10 INLINE opcode1, opcode2…. RETURN INLINE opcoden, opcoden+1…. |
Block of code is formed by two operators INLINE, so the second operator is hidden after RETURN. |
Note. It is possible to automate process of creating INLINE blocks.
Just use bin2line.exe to convert machine code to INLINE operators.
It is shown below:
avrasm32 -fI -l %1.lst -o %1.hex %1.asm
hex2bin %1.hex %1.bin
bin2line -i %1.bin -o %1.bas
.include "m64def.inc"
mov r30,r16
mov r31,r17
ld r18,z+
ld r19,z+
cli
out OCR1AH,R19
out OCR1AL,R18
sei
ret
INLINE block after conversion:
INLINE 12256,12273,37153,37169,38136,48443
INLINE 48426,38008,38152
You need put it in BASIC program, add label before the first INLINE and write RETURN or GOTO (as you need) after the first INLINE
200 INLINE 12256,12273,37153,37169,38136,48443
RETURN
INLINE 48426,38008,38152
Action:
Creates the block of a machine code at a stage of program loading.
Connects a code to a vector at a stage of execution.
If code of interrupt handler does not fit in one line, it is possible to continue in next line,
but using INLINE operator.
The line with INTERRUPT should be separated from other code
by one of operators RETURN, GOTO as you need. At a stage of execution the line with INTERRUPT should be
interpreted once for interrupti initialization. Requirements on registration of the block of a
code same as well as for operator INLINE.
Can be simultaneously used up to 10 vectors. It is impossible to set interruptions
For UART0 and TIMER0 as they are used by system.
Syntax:
INTERRUPT vector, opcode1, opcode2….
Example:
INTERRUPT vector, opcode1, opcode2…
200 INTERRUPT vector, opcode1, opcode2… |
The simpliest case is when the handler takes only one line The operator INTERRUPT gets the start address of the code block and binds it with needed vector.
|
Action:
Disconnects the a handler code from vector and disables corresponding interrupt.
Syntax:
DELETEVECTOR vector
Action:
Assigns value of variable used in interrupt subroutine. During this action interpreter
disables interrupts to provide complete (atomic) updating a two-byte variable.
It is necessary, as operation of giving contains a chain of several commands which could be broken off
by the interrupt, providing access to the same variable..
Syntax:
PUTATOMIC var, value
Action:
Gets value from a variable used in an interrupt. During this operator executing interrupts are disabled.
Syntax:
some_var = GETATOMIC(var)
2.5 CONTROLER’S PINS ASSIGNMENT AND USE
Pin | Main function | Alternative |
|---|---|---|
0 | PA0 | ADC0 |
1 | PA1 | ADC1 |
2 | PA2 | ADC2 |
3 | PA3 | ADC3 |
4 | PA4 | ADC4 |
5 | PA5 | ADC5 |
6 | PA6 | ADC6 |
7 | PA7 | ADC7 |
8 | PB0 |
|
9 | PB1 |
|
10 | PB2 |
|
11 | PB3 |
|
12 | PB4 |
|
13 | PB5 |
|
14 | PB6 |
|
15 | PB7 |
|
16 | PC0 |
|
17 | PC1 |
|
18 | PC2 |
|
19 | PC3 |
|
20 | PC4 |
|
21 | PC5 |
|
27 | PD3 |
|
28 | PD4 | PWM0 |
29 | PD5 | PWM1 |
30 | PD6 |
|
31 | PD7 |
|
Action:
Defines the pin function of the controller pins.
The controller pins have numbering from zero up to some maximum value that depends on
the type of controller. The Sets of additional pin functions depends on type of the controller too. See table to reference.
|
Small |
Mini |
Maxi |
Type |
ATMEGA16 |
ATMEGA32 |
ATMEGA64 |
Available pins |
26 |
26 |
|
Pins allowed to change direction function DIN/DOUT |
0..21, 27..31 |
0..21, 27..31 |
|
Pins allowed to set analog mode AIN |
0..7 |
0..7 |
|
Pins allowed to set PWM function |
28,29 |
28,29 |
|
Syntax:
DEFPIN pin AS type
Note.
| type | function |
DIN |
Discrete input |
DOUT |
Discrete output |
AIN |
Analog input |
PWM |
Pulse width modulation |
Example:
| DEFPIN 8 AS DOUT | Sets pin #8 to operate as a discrete output |
Action:
Sets pin logic level to zero
Syntax:
CLEARBIT pin
Action:
Sets pin logic level to one
Syntax:
SETBIT pin
Action:
Switches pin logic level to the inverted state
Syntax:
TOGGLE pin
Action:
Reads pins logic level
Syntax:
var = TESTPIN(pin)
Action:
Puts a digital value out to the PWR channel
Syntax:
PWR pwm_pin, value
Action:
Set the analog multiplexer up
Syntax:
SETADMUX value
Note.
value = reference source + channel number
| Reference source |
|
0 |
pin AREF |
64 |
pin AVCC |
192 |
internal 2.56 volt |
Action:
Reads meassured value from the current channel ADC
Syntax:
var = ADС
2.6 ACCESS TO INTERNAL RESOURCE OF MICROCONTROLLER
Action:
Writes byte to memory or I/O port
Syntax:
POKE adr, val
Action:
Reads byte from memory or I/O port
Синтаксис:
var = PEEK(adr)
Note: You should reference to avr datasheet to get the address of register. Remember there are two addresses: I/O and memory. PEEK and POKE operate with memory address and and you need to add 32 to get I/O address.
2.6.1 Access to the 16-bit registers
Access to the 16-bit registers of avr micro has features. It uses hardware temporary 8-bit register.
From the program point of view, there are some rules to access:
1. Use IN and OUT assembler operators.
2. For write: access to the highest register is first.
3. For read: access to the lowest register is first.
This is an example of two subroutines for access register OCR1A using BASIC variable A:
REM .include "m64def.inc"
REM mov r30,r16
REM mov r31,r17
REM ld r18,z+
REM ld r19,z+
REM cli
REM out OCR1AH,R19
REM out OCR1AL,R18
REM sei
REM ret
REM WRITE to OCR1A
200 INLINE 12256,12273,37153,37169,38136,48443
RETURN
INLINE 48426,38008,38152
REM .include "m64def.inc"
REM mov r30,r16
REM mov r31,r17
REM cli
REM in R18,OCR1AL
REM in R19,OCR1AH
REM sei
REM st z+, r18
REM st z+, r19
REM ret
REM READ from OCR1A
300 INLINE 12256,12273,38136,46378,46395,38008
RETURN
INLINE 37665,37681,38152
2.7 MATH ROUTINES
Action:
Returns high byte
Syntax:
var = HIGH(expression)
Action:
Returns low byte
Syntax:
variable = LOW(expression)
Action:
Returns absolute value
Syntax:
variable = ABS(expression)
Action:
Shifts value of variable left. The LSB is set to 0.
Syntax:
ROL variable, number of shifts
Action:
Shifts value of variable right. The MSB is set to 0.
Syntax:
ROR variable, number of shifts
Action:
Performs the scaling
Syntax:
SCALE Variable, multiplier, divider
Examples:
SCALE X,100,Y |
Calculates percent of number X from number Y. First X * 100 and put result into 32 bit temporary variable M32, then M32 / Y and put result into X |
SCALE X,1000,Y |
The same, but 10 times more precision |
2.8 SOME BASIC EXTENTIONS
Action:
Returns pulse width on the controller pin unit that are
approximately 1 uS at frequency of quartz 14.745 MHz
Синтаксис:
var = PULSEIN(pin, option, timeout)
Note
option |
|
0 |
Waiting for raise edge and measurement pulse width |
1 |
Waiting for fall edge and measurement of pulse width |
Action:
Forms pulse on the pin
Syntax:
PULSEOUT pin, duration
pin – pin number
duration - duration in uSec for resonator 14.745 MHz
Action:
Returns the incoming sequence of bits
Syntax:
var = SHIFTIN(data_pin, clock_pin, bits, delay, option, timeout)
Note:
data_pin |
incoming data |
clock_pin |
Synchro, mode defined in option |
Bits |
number of bits |
Delay |
Delay in uSec for resonator 14.745 MHz |
Option |
Mode of synchronization: |
timeout |
Time in mSec on which expiration function returns a zero and variable LASTERROR accepts value 1. Value timeout is actual when clk_pin works as synchro_input |
Action:
Outputs contents of a variable as sequence of bits
Syntax:
SHIFTOUT var, data_pin, clock_pin, bits, delay, option
Note:
Var |
Variable contains a value to be converted to consecutive code |
Data_pin |
Output consecutive data |
clock_pin |
Synchro, mode defined in option |
Bits |
number of bits |
Delay |
Delay in uSec for resonator 14.745 MHz |
Option |
Mode of synchronization: |
2.9 TWO WIRE INTERFACE
Action:
Iinitializes TWI (I2C)
Syntax:
TWIINIT bps, prescale
bps – number for bps needed
prescale - can be defined from equation:
SCL frequency = CPU Clock frequency / (16 + 2(bps) * 4^prescale)
Action:
Generates START condition on SDA and SCL pins
Syntax:
TWISTART
Action:
Sends byte to TWI (I2C) device
Syntax:
TWIWRITE байт
Action:
Reads byte from TWI (I2C) device. ACK/NACK generate
Syntax::
var = TWIREAD(ack)
Parameter ack:
0 – NACK
1 – ACK
Action:
Generates STOP condition on SDA and SCL pins
Syntax::
TWISTOP
Example:
| print "***************************" print "* DS1339U TWI TEST *" print "***************************" DIM A(16) TWIINIT 16,2 TWISTART rem DS1339U Slave address to write TWIWRITE &HD0 rem Trickle Charger Register (10h) TWIWRITE &H10:TWIWRITE &B10100101 TWISTOP 10 A=0:TWISTART:TWIWRITE &HD0:TWIWRITE A:TWISTOP TWISTART:TWIWRITE &HD1 FOR i=0 to 5 A(i)=TWIREAD(1) NEXT A(6)=TWIREAD(0):TWISTOP PRINT "Year:"; if (A(5)AND 128)=0 then print "19";else print "20"; print bcd(a(6),2); print " Month:";bcd(a(5) AND 127,2); print " Date:";bcd(a(3),2);" Day:";bcd(a(3),2); print " ";bcd(a(2),2);":";bcd(a(1),2);":";bcd(a(0) GOTO 10 |
|---|
2.10 DIAGNOSTICS
At execution of the program there can be situations at which the interpreter stops the work and sends the message on an error in which the code and number of a line is underlined.
Error code |
Error |
|---|---|
0 |
Syntax error |
1 |
Unbalanced parentheses |
2 |
No expression present |
3 |
Equals sign expected |
4 |
Not a variable |
5 |
Label table full |
6 |
Duplicate label |
7 |
Undefined label |
8 |
THEN expected |
9 |
TO expected |
10 |
Too many nested FOR loops |
11 |
NEXT without FOR |
12 |
Too many nested GOSUBs |
13 |
RETURN without GOSUB |
14 |
Array not defined |
15 |
Duplicatearray definition |
16 |
Out of memory |
17 |
Array index out of range |
18 |
Pointer out of DATA |
20 |
Can not assign more vectors |
Action:
Returns last error or critical situation code
Syntax:
var = LASTERROR()
Note::
Error code |
Error |
0 |
No errors |
1 |
Timed out (PULSEIN, SHIFTIN) |
2 |
TWI error |
3. PRE-PROCESSOR
BASIC language is an extremely simple language, but it is difficult to write big programs by BASIC
because the variables length is too short. The best case is when the possible length allows
to write “selfcomment” variables. But, long variables, labels could be the cause of slow speed
interpreting and resource consuming. A special program-converter can help to resolve this coflict.
Our interpreter will still working with short names, but we will work with long names by placing
the lines with the preprocessor instruction DEFINE in the program text as shown below:
DEFINE some_long_name = D ‘ defines self comment variable
DEFINE one_more_long_name = 100 ‘ defines constant or label
You can use the apostrophes to start a comment line. At the end you will get something like the program shown below:
|
'-------------------------------------------------------- define TotalBits = N ' Количество бит от 1 до 16
|
|
This text needs to be cnvereted before downloading into controller.
First we save text of program as shift.bas for example .
Then in a command line we can type:
BASPREP.EXE –I shift.bas –O shift.out
Note. BASPREP.EXE must be placed in the same catalogue or be visible of a current arrangement. You can put to C:\WINDOWS for example.
We will get something like shown below as a result of conversion.
|
CLS
|
|
The preprocessor eliminates all of the comments and substitute the long names for theirs short values.
4. PROGRAM DOWNLOADING
HyperTerminal or another terminal application must be set up as shown below:
Baud rate 57600 bps
Data/Stop bits 8/1
Parity None
Flow Control Hardware
Terminal emulation ANSII / VT100
Add sent CR with LF
There are two ways to download.
The first one is by using the text file sending option of the terminal.
The second way is downloading using paste from the clipboard if you are using Windows HyperTerminal, for example.
1.Make sure that write protect jumper is open.
2.Connect the controller to PC by RS232 cable.
3.Power it up.
4.Start terminal application.
5.Press the reset button on the controller.
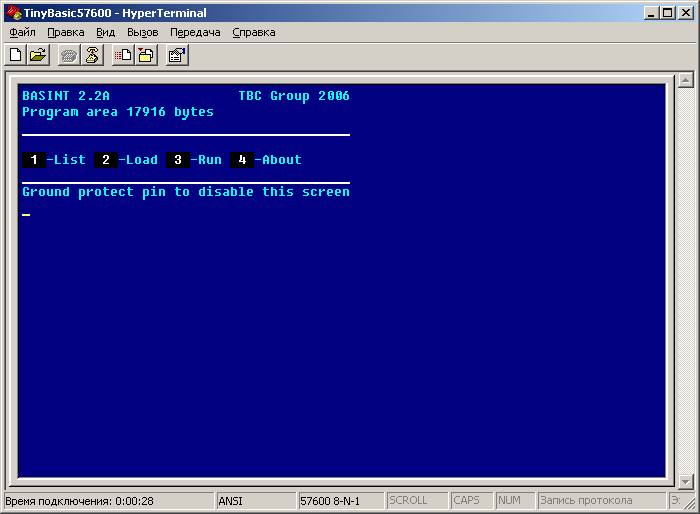
The start page appears in the terminal window.
6. Press menu option 2 to force the controller be waiting for input text.
7. Send a program by using the text file sending option of the terminal or paste text from the clipboard.
8. Press menu option 1 to list the downloaded program.
9. Press menu option 3 to run the downloaded program.
10. Close write protect jumper. It alows:
- protect program;
- diasable start page screen;
- automatically sart program when the controller is powered up.
___________________________________
By
Alexander Kostyuk ua6ann@mail.ru
Evgeny Fadeev rv3bj@hotbox.ru
| 05/21/2007 |